Robotics is most likely the high 3 most formidable issues ever undertaken by humanity. Area exploration is an effective shout for the primary spot. However that’s debatable as a result of robotics is about imitating life. And nothing is more durable than imitating life (in our opinion).
Nonetheless, to essentially imitate life, robots want movement that resembles animal or human habits. However constructing a robotic that may navigate its atmosphere in that vogue is a wholly completely different ball recreation.
Navigation requires a robotic to understand its environment, cause about the perfect plan of action, keep away from obstacles, and recuperate gracefully when issues go incorrect.
Xavor makes use of the Nav2 (Navigation 2) framework to present our robots the intelligence they should function safely in complicated, real-world environments. And on this weblog, we’ll share our expertise utilizing IT throughout our numerous robotics options.
What Is Nav2?
Nav2 is the official, industry-standard navigation software program stack for ROS 2 (Robotic Working System 2). IT is the fashionable open-source middleware that powers skilled robots worldwide. Consider IT as a extremely superior autopilot system purpose-built for floor robots.
A customary GPS tells you the place you’re, however Nav2 tells the robotic easy methods to get there. IT calculates routes whereas avoiding partitions and folks. Furthermore, bodily AI robots constructed utilizing Nav2 can recuperate from surprising blocks and do all of this in actual time.
Nav2 will not be a single program. IT is an ecosystem of coordinated software program modules, every dealing with a definite piece of the navigation downside. These modules talk seamlessly by way of ROS 2, and collectively they provide a robotic all the pieces IT must go from level A to level B with out human intervention.
How does Nav2 work? The three questions each robotic should reply
To navigate efficiently, a robotic must repeatedly reply three elementary questions:
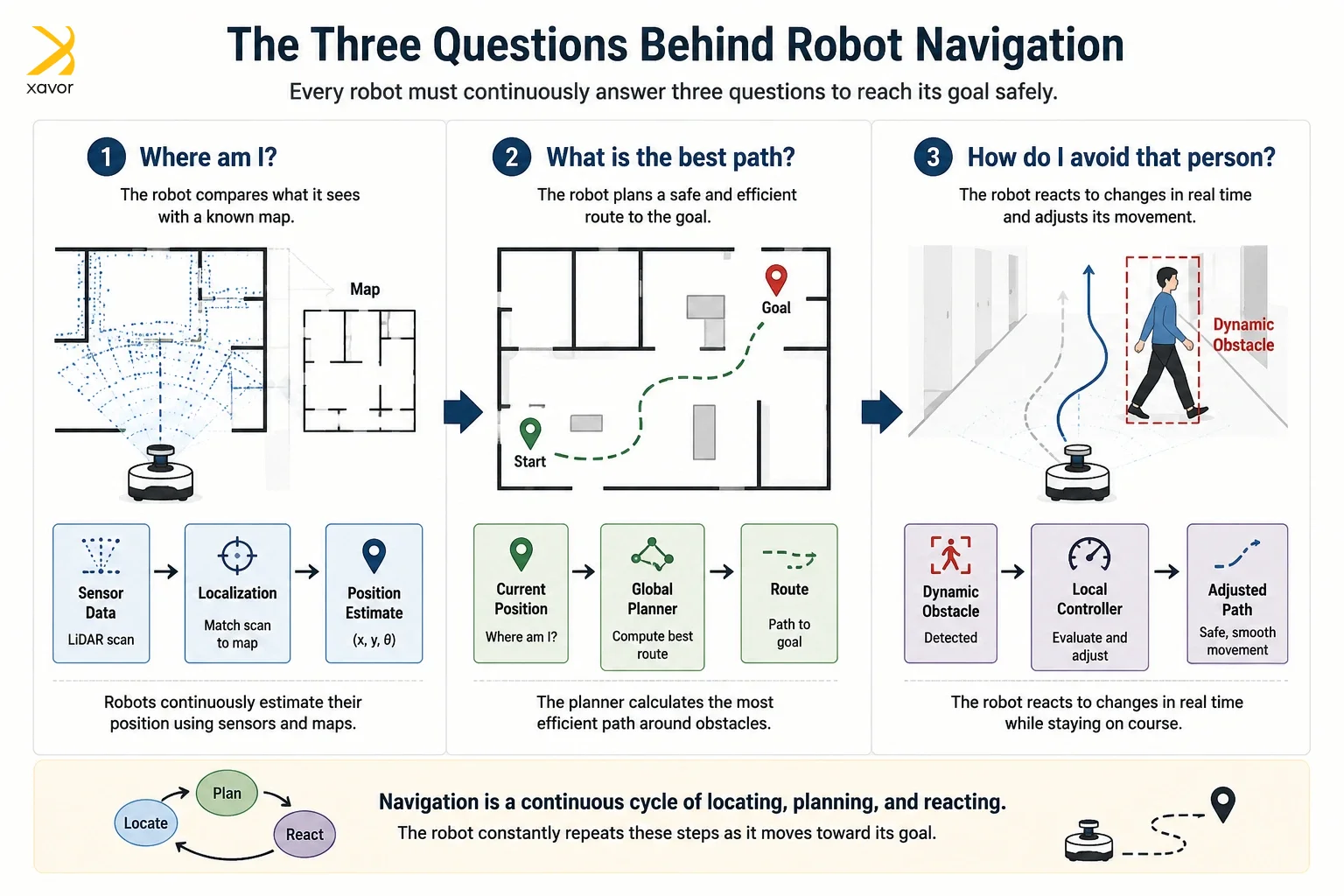
“The place am I?” is about localization
There are scenes in motion pictures the place the hero positive aspects consciousness and instantly asks the place am I? Robots work just about like that. Earlier than they can plan a route, robots should know their personal place on the map. Nav2 accomplishes this by way of a course of known as localization.
Utilizing information from sensors reminiscent of LiDAR (Gentle Detection and Ranging) and depth cameras, the robotic compares what IT at the moment “sees” to a pre-built map of its atmosphere.
A typical algorithm used right here is AMCL (Adaptive Monte Carlo Localization), which maintains a statistical distribution of potential robotic positions and repeatedly refines IT as new sensor information arrives.
For extra demanding eventualities, instruments like slam_toolbox enable the robotic to construct and replace the map concurrently, which is a way often known as SLAM (Simultaneous Localization and Mapping).
“What is the greatest path?” results in world planning
As soon as the robotic is aware of the place IT is, Nav2’s World Planner calculates essentially the most environment friendly path to the vacation spot. This works equally to how Google Maps finds the quickest route between two addresses. Besides the “roads” are the open areas within the robotic’s map and the “obstacles” are partitions, furnishings, and different bodily limitations.
Frequent world planning algorithms embrace NavFn and Smac Planner, each of which may produce easy, kinematically possible paths suited to the robotic’s measurement and motion constraints.
“How do I keep away from that particular person?” decides native management
This query is one thing quite a lot of automobile drivers must also know the reply to. In robots, the worldwide plan offers the machine a roadmap. However the true world is dynamic, the place issues occur randomly. Individuals transfer in a second, and new obstacles seem unexpectedly.
The Native Controller (or Native Planner) is chargeable for executing the worldwide path in actual time whereas repeatedly reacting to those modifications.
Nav2 makes use of controllers like DWB (Dynamic Window Method B) or the newer MPPI (Mannequin Predictive Path Integral) controller. These algorithms pattern many potential movement trajectories each few milliseconds, consider each for security and progress, and choose the perfect possibility that permits easy, collision-free motion even in crowded areas.
Understanding the costmap: The robotic’s consciousness layer
On the coronary heart of Nav2’s security system is the Costmap. A costmap is a grid-based illustration of the atmosphere that assigns a price worth to each cell, the place the next value means the cell is extra harmful or tough to traverse.
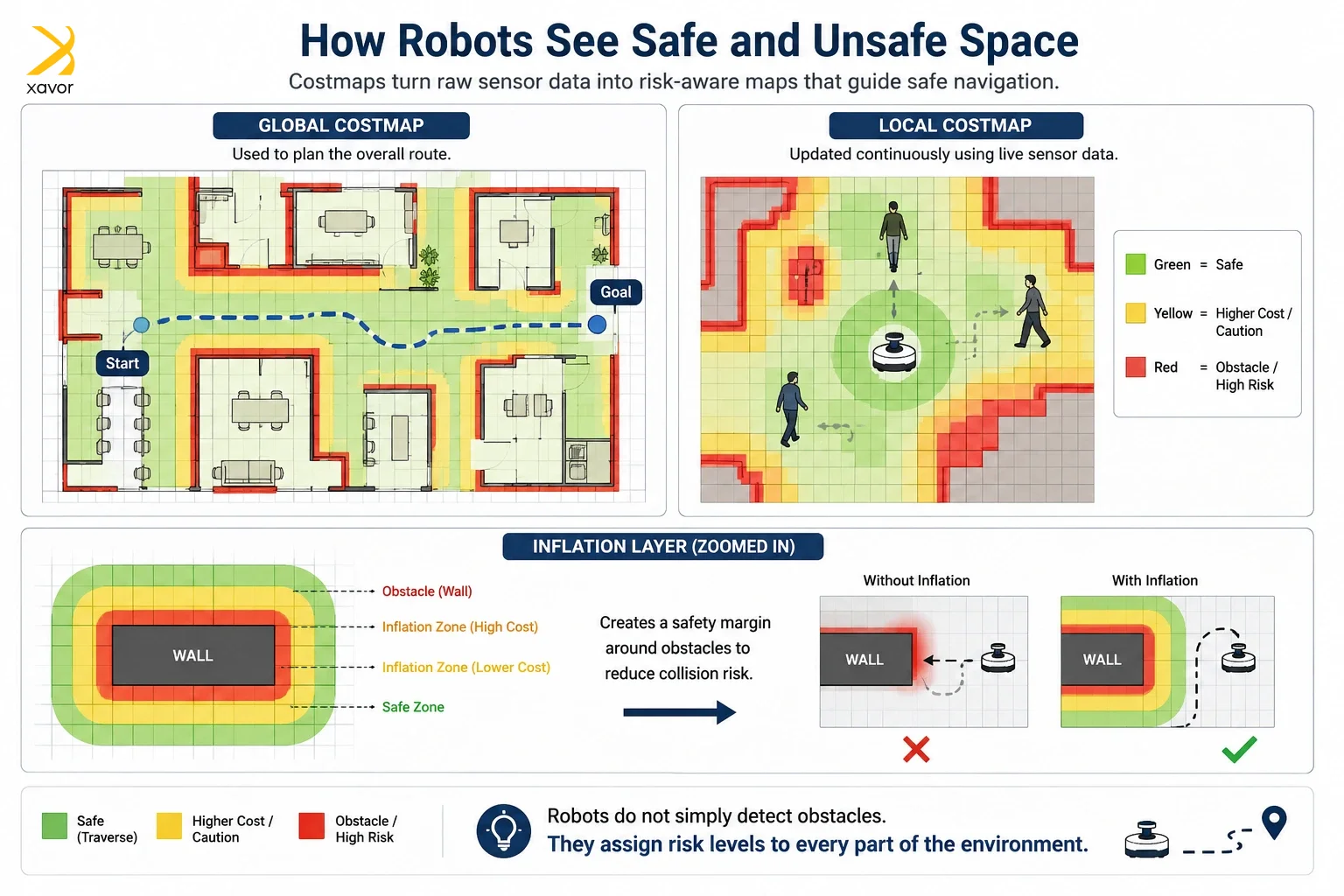
Nav2 operates two costmaps concurrently:
- World Costmap: A static, big-picture map utilized by the worldwide planner to seek out the general route.
- Native Costmap: A smaller, real-time map across the robotic, continuously up to date with stay sensor information to deal with dynamic obstacles.
A key characteristic of each costmaps is the Inflation Layer. This layer expands each impediment outward by a configurable radius, making a digital “keep-out zone.” This ensures the robotic maintains a secure buffer distance from partitions, gear, and folks — even when navigating in tight corridors.
Conduct timber: The decision-making mind
One among Nav2’s strongest options is its use of Conduct Bushes (BTs) because the high-level decision-making engine. Not like conventional “if-this-then-that” scripting, Conduct Bushes manage complicated robotic behaviors right into a hierarchical, modular construction.
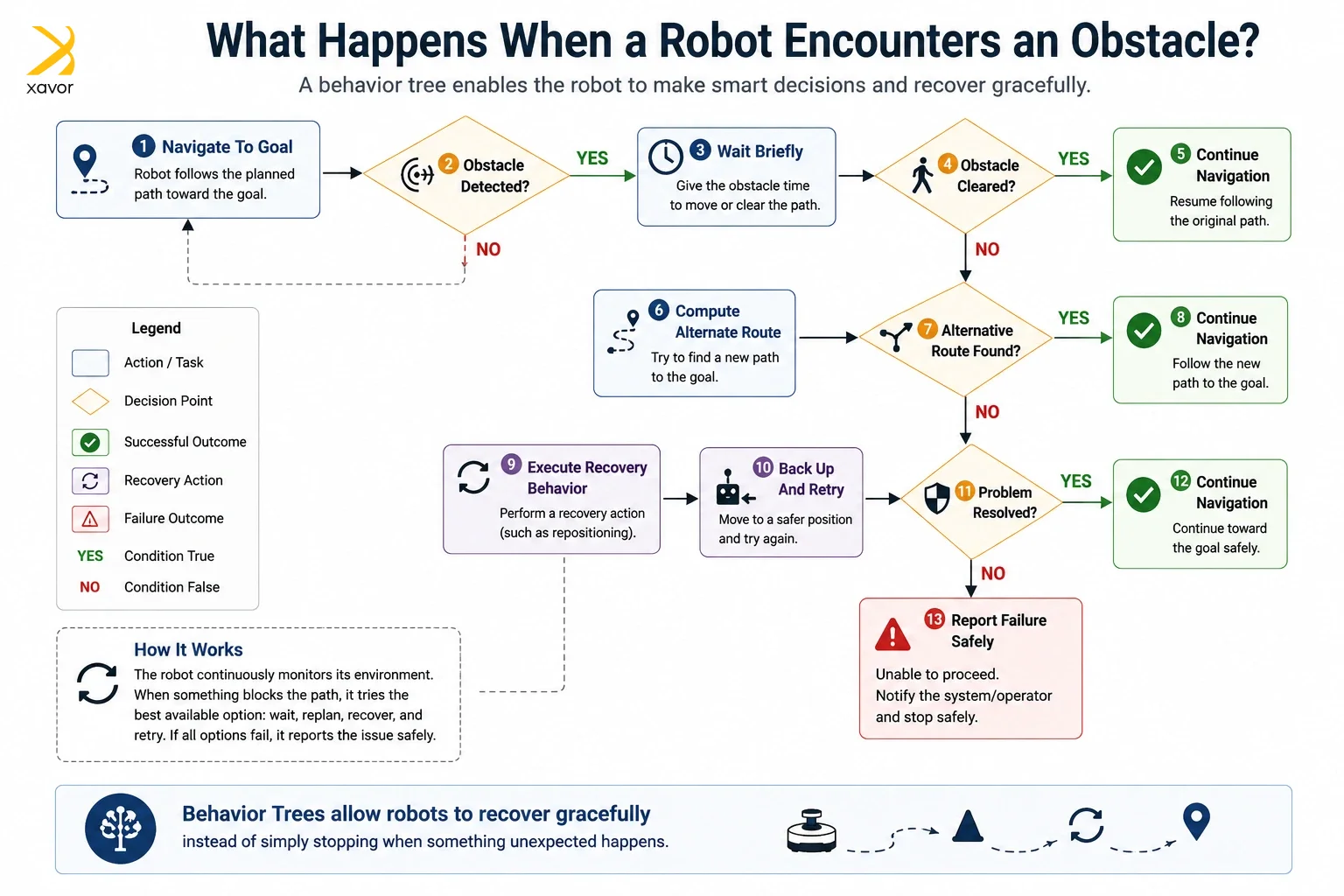
BTs matter enormously in apply. Take into account a situation the place a robotic is navigating to a vacation spot and encounters an individual standing in its path. With a easy script, the robotic would possibly simply cease and wait indefinitely. With a Conduct Tree, Nav2 can:
- Watch for a configurable interval to see if the impediment clears.
- If no various exists, again up and check out once more from a special angle.
- If all restoration behaviors fail, report the failure gracefully to the system operator.
Sleek failure dealing with is crucial in skilled environments. Robots have to be predictable and secure even when issues go incorrect, and Conduct Bushes give Nav2 the pliability to deal with an infinite number of real-world eventualities with out hard-coding each potential edge case.
Modular design: Constructed for each robotic
Nav2 is constructed round a plugin-based structure. Each core element — the planner, controller, costmap layer, and restoration habits — is a plugin that may be swapped out relying on the applying.
Which means that the identical Nav2 framework can energy robots with very completely different necessities:
- A small indoor supply robotic would possibly use a light-weight DWB controller and a easy 2D LiDAR for speedy, energy-efficient navigation.
- A big hospital service robotic would possibly mix an RGB-D digicam, a extra refined MPPI controller, and extra costmap layers for human-aware navigation.
- An outside last-mile supply platform would possibly add GPS fusion and terrain-aware planning plugins.
At Xavor, we reap the benefits of this modularity to configure Nav2 exactly for every deployment atmosphere, quite than constructing a one-size-fits-all answer that compromises efficiency throughout use instances.
Why Xavor chooses Nav2
With dozens of navigation frameworks accessible, the selection of Nav2 is deliberate. Right here is why IT stands out:
- Manufacturing-Prepared Reliability: Nav2 is actively maintained by Open Robotics and a big open-source group. IT has been examined and deployed in real-world industrial robots throughout industries.
- ROS 2 Native: Constructed particularly for ROS 2, Nav2 advantages from ROS 2’s fashionable real-time capabilities, safety features, and multi-robot assist. These capabilities weren’t supplied in the older ROS 1 navigation stack.
- {Hardware} Agnostic: Nav2 runs on any robotic {hardware}, which makes IT an excellent long-term funding as {hardware} scales.
- Diminished Improvement Time: By leveraging a battle-tested framework, our engineering groups spend much less time reinventing navigation fundamentals and extra time fixing the distinctive challenges of every buyer’s deployment atmosphere.
- Security by Design: With built-in restoration behaviors, inflation layers, and real-time impediment avoidance, Nav2 treats security as a first-class concern.
Actual-world affect: The place we use Nav2
Nav2 will not be a analysis prototype. IT is the spine of actual deployments. At Xavor, we use IT to energy our indoor service robots in eventualities that demand each reliability and human-safe operation:
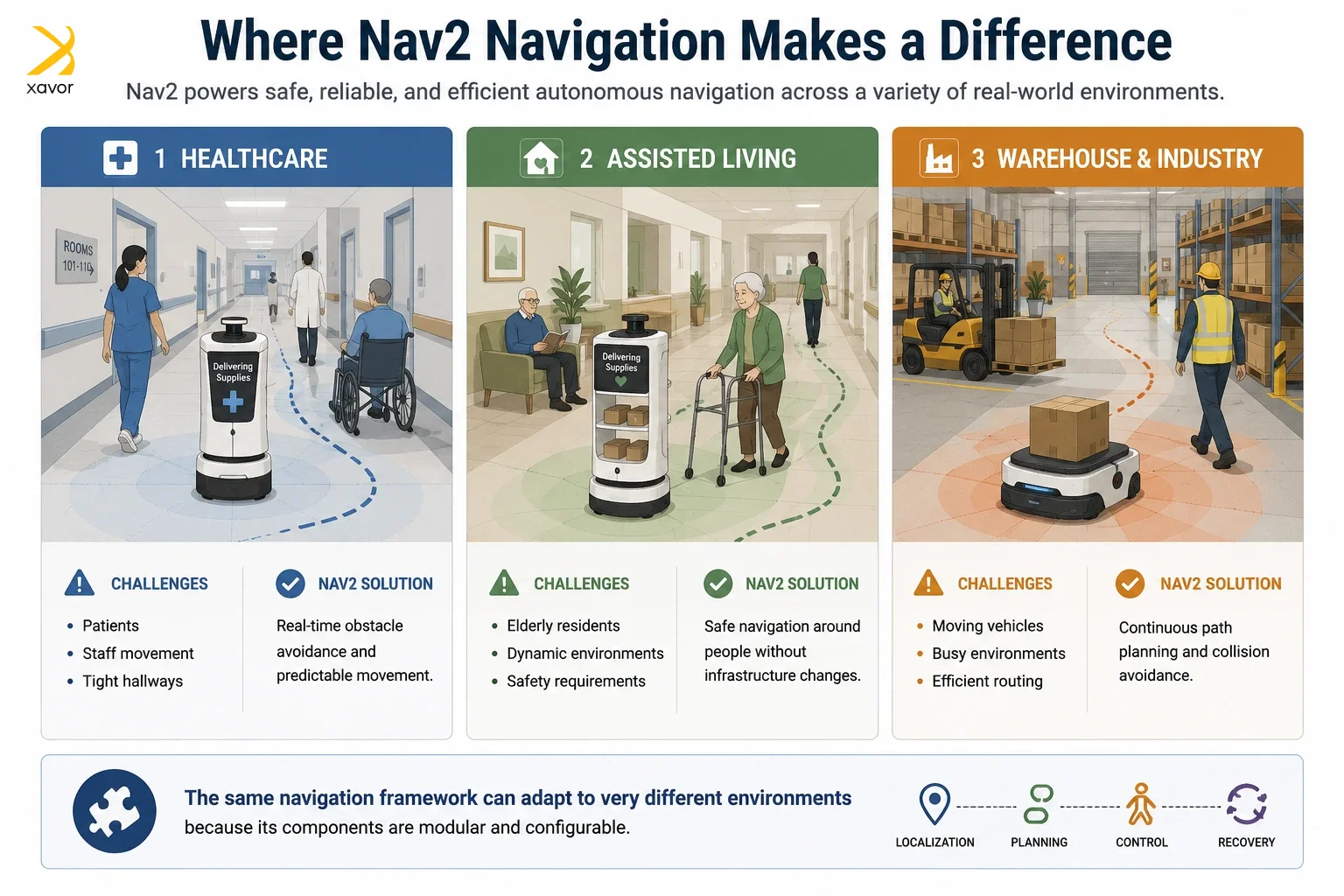
- Care and Assisted Residing Services: Robots that navigate autonomously by way of corridors, keep away from residents and workers, and ship provides or companionship with out requiring devoted infrastructure modifications.
- Healthcare Environments: Exact, predictable navigation in clinics and hospitals the place surprising behaviour of robots in healthcare will not be acceptable.
- Industrial and Warehouse Flooring: Autonomous transport of supplies with real-time dynamic impediment avoidance round forklifts and staff.
In every of those domains, the mixture of Nav2’s localization accuracy, planning effectivity, and real-time security responses interprets immediately into robots that operators and end-users can belief.
Conclusion
Navigation for robotics will not be a solved downside. Environments change, new sensors emerge, and consumer expectations develop. Nav2’s open, modular structure means IT continues to evolve with new planners, controllers, and notion integrations being contributed by the worldwide ROS 2 group.
Xavor stays deeply invested on this ecosystem. Our engineering group repeatedly evaluates new Nav2 capabilities to make sure our robots keep on the forefront of autonomous navigation.
In case you are inquisitive about how autonomous navigation may remodel your operations, contact us at [email protected] to debate what robotics can do for you.
In regards to the Creator

Ali is the Technical Lead for Robotics and Embedded Programs at Xavor, specializing in UAVs and ROS-based robotic improvement. He manages all the product lifecycle—from preliminary prototyping to field-ready deployment—delivering refined autonomous options throughout each industrial and protection domains.
FAQs
Nav2 (Navigation 2) is a robotics framework used to assist autonomous robots navigate safely and effectively in real-world environments. IT permits robots to find out their location, plan routes, keep away from obstacles, adapt to altering environment, and attain locations with out human intervention.
Not precisely. Nav2 is a navigation framework and software program stack for ROS 2 that consists of a number of packages working collectively. These packages deal with duties reminiscent of localization, path planning, impediment avoidance, habits administration, and restoration actions, enabling robots to navigate autonomously in complicated environments.
Sure. Nav2 is an open-source navigation framework for ROS 2 (Robotic Working System 2) that’s actively maintained by the robotics group and supported by Open Robotics contributors. Its open-source nature permits builders to customise, lengthen, and deploy IT throughout a variety of robotic platforms and purposes.
👇Comply with extra 👇
👉 bdphone.com
👉 ultractivation.com
👉 trainingreferral.com
👉 shaplafood.com
👉 bangladeshi.help
👉 www.forexdhaka.com
👉 uncommunication.com
👉 ultra-sim.com
👉 forexdhaka.com
👉 ultrafxfund.com
👉 bdphoneonline.com
👉 dailyadvice.us